Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Automated plot generation is the challenge of creating a sequence of events that make a coherent story.
- Traditional symbolic planners create stories from a goal state, but rely on hand-crafted actions.
- Neural language models can generate stories with great diversity, but have trouble ending stories and maintaining coherence.
- This paper presents an approach to story plot generation that combines causal planning with neural language models.
- The system infers preconditions for events in the story and then events that will cause those conditions to become true.
- Automatic evaluation was used to measure narrative coherence.
- Results show that the proposed method produces more coherent plotlines than several strong baselines.
Paper Content
Introduction
- Automated plot generation is the challenge of creating a sequence of events that make up a coherent story.
- Early solutions to story generation used symbolic planning and case-based reasoning.
- Symbolic planners guarantee logical soundness of a plan and create character believability, character conflict, and theory of mind.
- Narrative psychologists note the importance of plot coherence for reader comprehension.
- Symbolic planners require hand-crafted schemas to define preconditions and effects.
- Neural language model based approaches can generate diverse stories.
- This paper seeks to unify the strengths of symbolic planning and neural text generation to achieve causally coherent stories.
- The story planner uses a large pre-trained language model to infer events and their preconditions.
- The system works backward from a given story ending and queries the language model to generate preconditions.
- The system outperforms other strong baselines in generating coherent plotlines.
Background and related work
- Planner finds sequence of actions to reach goal state
- Story and plot generation using symbolic planning results in causally coherent plotlines but lacks diversity and length
- Partial Order Causal Link Planning (POCL) used by some story planners
- Plan represented as a tuple of actions, causal links, and temporal ordering constraints
- Planner selects plan on fringe of plan-space and action with unsatisfied precondition
- Successor plan generated for each way of satisfying precondition
- POCL planners are cognitively plausible for humans
Neural story generators
- Early attempts at neural story generation used language models
- Attempts to control coherence include conditioning and hierarchical generation
- Language models not aware of story ending
- EDGAR system generates stories backward using language model based question-answering
- C2PO conducts bidirectional search using COMET model of commonsense inference
- TattleTale system uses classical symbolic planner to generate sequence of actions and condition language model
Neural story planner
- Proposed technique generates causally coherent story plans using causal links from POCL plan
- Plan is generated from right to left, starting with the final event
- Events and preconditions are inferred by a large language model
- Planner starts with an input sentence that specifies the ending of a story
- Planner is also provided with a set of initial conditions
- System recursively uses language model to infer preconditions of any event in the plot
- For any given precondition, system semigreedily accepts the first event inferred by the language model
- Open world setting avoids logical impossibilities
- Some inferences result in cycles of repeated events, in which case the planner backtracks and selects alternative inferences
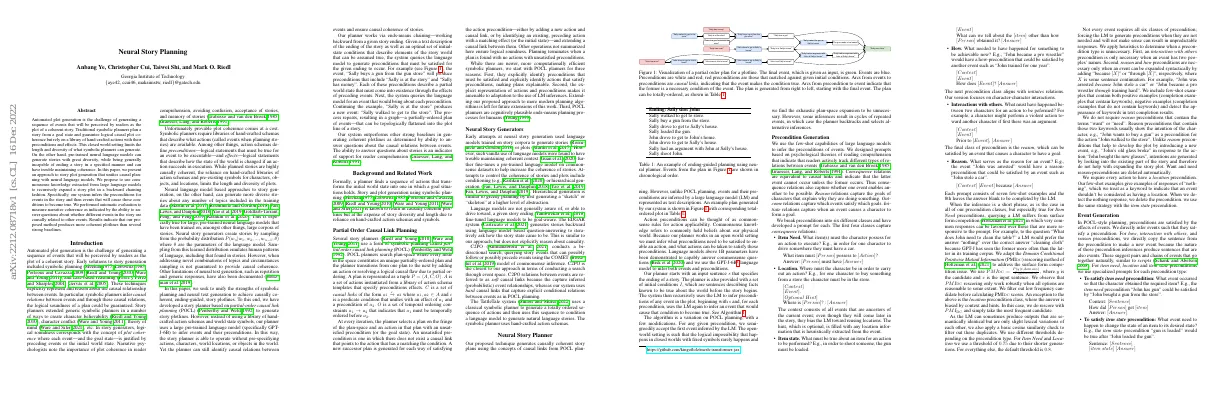
Precondition generation
- Use large language models to infer preconditions of events
- Prompts based on psychological theories of reading comprehension
- Six different classes of preconditions
- Item Need: What item must a character possess to do an action?
- Item State: What must be true about an item for an action to be performed?
- How: What needed to have happened for something to be achievable now?
- Interactions with others: What must have happened between two characters for an action to be performed?
- Reason: What serves as the reason for an event?
- Location precondition required for every action
- Want and need reason-preconditions are deleted automatically
- Use PMI DC rescoring to address surface form competition
- Cosine similarity check to filter out lexical variations
Event generation
- Preconditions are satisfied by the effects of events
- Directly infer events to satisfy preconditions
- Copy sentence from precondition to make a new event
- Generate pairs and chains of events that go together
- Use specialized prompts for each precondition type
- Create causal link between new event and precondition
- Represent plot as directed acyclic graph
- Greedy assumption that same event can satisfy multiple preconditions
- Check for existing event before generating new one
- Record multiple possible phrasings for duplicate events
- Discard generated precondition if identical to parent event
- Don’t model negative effects of events
Final total ordering
- Produce a total ordering of events in plot graph
- Prefer certain orderings over others
- Order events based on type of precondition satisfied
- Events that initiate character intentions should come first
- Events that make use of establishing events should come after
Evaluation
- Evaluated the extent to which planning technique generates coherent plots
- Used psychological studies to measure reader comprehension
- Prompted GPT-3 to answer enablement questions about generated plots
- Used ROCStories dataset to seed system and baselines
- Assessed whether plotlines are coherent
- Scored systems by percentage of time GPT-3 can determine if an event is enabled by prior events
- Did not evaluate systems using perplexity or BLEU score
Coherence measure
- Measure comprehension of generated stories by posing questions to GPT-3
- Exclude first sentence of story from evaluation
- Consider answerable if found in earlier part of story and not too similar to queried event
- Validate measure with 100 stories from ROCStories dataset, half of which should be answerable and half should produce “none”
- Measure has overall accuracy of 78.20%
Models and baselines
- Evaluated performance of neural planner against four baselines
- GPT-J-6B used to generate entire story
- C2PO uses bidirectional interpolation with commonsense inference
- comGen uses transformer based language model and two knowledge bases
- plan-write-revise fine-tuned on ROCStories with titles as topic
- Filtered out non-action sentences and single-event plots
- Constrained item-precondition generation to single precondition
Results and discussion
- Our planner achieves highest percentage of answerable enablement questions
- Our planner introduces events to story to enable future events
- Evaluation metric is sensitive to structure of story
- C2PO and comGen use commonense inferences from COMET
- C2PO generates commonense inferences about “wants” and “needs”
- ROCStories response rate of 85.39%
Conclusions
- Neural language models used to generate story plotlines
- System chains backward from given ending of story
- Language model used to infer conditions and events
- Search algorithm inspired by classical planning
- Generated stories focus on physically grounded action