Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Small training set sizes can be approximated by an infinite width neural network.
- After a critical sample size, finite-width networks become worse than infinite-width networks.
- Finite-size effects can become relevant for very small dataset sizes.
- Variance of the neural tangent kernel can explain the transition.
- Feature learning and ensemble averaging can push the transition to larger sample sizes.
Paper Content
Introduction
- Deep learning systems are achieving state of the art performance on a variety of tasks
- How generalization is controlled by network architecture, training procedure, and task structure is not fully understood
- Infinite-width networks yield a kernel method known as the neural tangent kernel
- Kernel methods are easier to analyze, allowing for accurate prediction of the generalization performance of wide networks
- Infinite-width networks can also operate in the meanfield regime
- Real networks have finite width, making analysis more difficult
- Unknown at what value of the training set size the effects of finite width become relevant
- Learning curve for the NN is well-captured by the learning curve for kernel regression
- Fluctuations in the final NTK over random initializations are suppressed at large width N and large feature learning strength
- P ∼ √ N transition and improvements due to feature learning through an alignment effect
- Variance contribution to generalization error can be reduced through ensemble averaging and feature learning
Problem setup and notation
- Supervised task with dataset D of size P
- Experiments focus on training networks to interpolate degree k polynomials on the sphere
- Generalization error scales as 1/P2
- Single output feed-forward NN with hidden width N
- Activations for an input x given by h
- Output of the network is fθ = h (L)
- Positively homogenous function (ReLU nonlinearity)
- Weights W ij ∼ N (0, 1)
- Scale of the output at initialization is O(σ L )
- Scale of the output is given by α = σ L
- Parameters trained with full-batch gradient descent on a mean squared error loss
- Generalization error approximates population risk
Empirical results
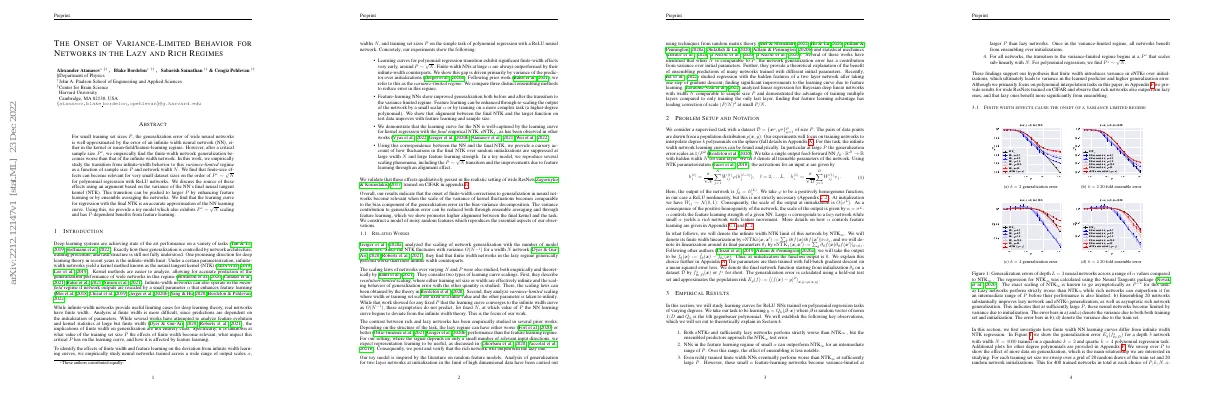
- Study learning curves for ReLU NNs trained on polynomial regression tasks
- Establish key observations
- NNs with small α can outperform NTK ∞ for an intermediate range of P
- Ensembling is less notable for small α
- Richly trained finite width NNs eventually perform worse than NTK ∞
- All networks benefit from ensembling in variance-limited regime
- Transition to variance-limited regime begins at P* that scales sub-linearly with N
Finite width effects cause the onset of a variance limited regime
- Finite width neural networks (NNs) and Neural Tangent Kernels (NTKs) have discrepancies that are explored in the paper.
- Ensemble averaging is used to calculate the error of the NNs.
- Phase plots are used to show the generalization, variance and kernel alignment of the NNs.
- Variance is lower for small α.
- Kernel alignment is related to good generalization.
- Most of the variance is due to initialization.
Final ntk variance leads to generalization plateau
- Variance over initialization can be interpreted as kernel variance in both the rich and lazy regimes
- All networks have same generalization error as kernel regression solutions with their final eNTKs
- Properties of eNTK f have been studied in prior works
- Final network generalization error matches generalization error of eNTK f
- Variance of final predictor related to corresponding infinite width network
- Finite size fluctuations of kernel at initialization have been studied
- Variance of kernel elements scales as 1/N
- Bias-variance decomposition holds for rich networks at small α
Feature learning delays variance limited transition
- Feature learning alters the onset of the variance limited regime.
- The onset of the variance limited regime is defined as the point where over half of the generalization error is due to variance over initializations.
- P 1/2 scales as √ N for this task.
- The delay of the variance limited transition is due to the kernel variance at initialization scaling as σ 2L /N.
Signal plus noise correlated feature model
- NN generalization error is approximated by kernel regression solution with eNTK f
- Analysis of generalization of kernel machines depending on network initialization θ 0
- Kernel generalization theory developed with statistical mechanics
- Attempt to derive approximate learning curves in terms of eNTK f’s signal and noise components
- Kernel interpolation problem solved by performing linear regression with features ψ(x, θ 0 )
- Averaging kernel directly and performing regression with this kernel exhibits largest reduction in generalization error
Toy models and approximate learning curves
- Characterize the test error associated with a Gaussian covariate model in a high dimensional limit
- Expected generalization error has a specific form
- Experiments show predictive accuracy of the theory
- Compute explicit learning curves for a simple toy model
- Replica calculation demonstrates that test error is self-averaging
Explaining feature learning benefits and error plateaus
- Kernels exhibit fluctuations over initialization with variance O(1/N)
- Small width networks enter the variance limited regime earlier and have higher error
- Altering the scale of the noise affects transition time and asymptotic error
- Transition occurs around P ∼ √ N
- Feature learning leads to improvements in the learning curve before and after onset of variance limits
- Enhancement of signal eigenvalue leads to lower bias and lower asymptotic variance
Conclusion
- Performed an empirical study on deep ReLU NNs learning a polynomial regression problem
- Performance worse than infinite width limit due to initialization variance
- Onset of variance limited regime can occur early with P 1/2 ∼ √ N
- Random-feature model used to explain and reproduce observed behavior
- Implications for choice of initialization scale, neural architecture, and number of networks in an ensemble
- Generated dataset by sampling x µ uniformly on unit sphere in R D
- Used JAX for neural network training
- MLPs of depth 2 and 3 used, no bias terms
- Trained with full batch gradient descent with learning rate η
- Swept over 15 values of P in logspace from size 30 to 10k, and 6 values of N in logspace from size 30 to 2150
- Swept over alpha values 0.1, 0.5, 1.0, 10.0, 20.0
- Saved generalization error, vector of ŷ predictions, initial and final parameters
- Applied same methodology of centering network and allowing α to control degree of laziness
- Binary classification task for CIFAR-10, subsampled 8 classes into 2
- Initial learning rate η 0 = 10 −3 , trained for 24,000 steps
- Swept α from 10 −3 to 10 0 and P from 2 9 to 2 15
- Ensembles of size 20, randomly sampled 5 training datasets of size P
- Symmetric decomposition of generalization error in terms of variance due to initialization and variance due to dataset
- Bagged predictor does not have substantially lower generalization error
- Most of variance driving higher generalization error is due to variance over initializations
- Fraction of E g that arises from variance due to initialization, variance over datasets, and total variance for width 1000
- Leading order terms have mean zero around their infinite-width limit
- Ensemble averages of feature learning networks have same generalization as infinite-width mean field solutions
- Change in output scales as O(1), change in features scales as (α √ N ) −1
- Used kernel alignment metric for diagonally dominant kernels