Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Visual recognition aims to understand objects and scenes from a single image.
- 3D recognition is more challenging due to occlusions not depicted in the image.
- This work explores single-view 3D reconstruction by learning generalizable representations.
- A framework is introduced that operates on 3D points of single objects or whole scenes.
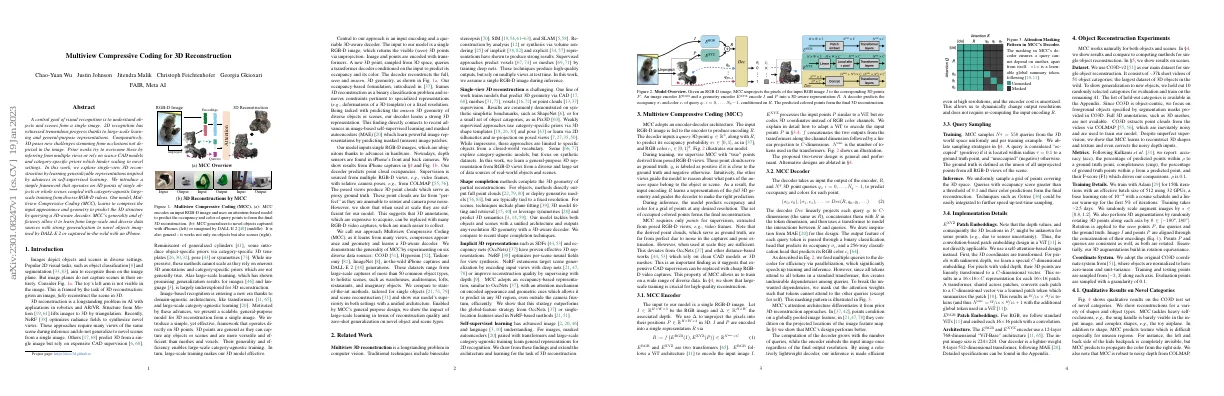
- The model, Multiview Compressive Coding (MCC), learns to compress the input appearance and geometry.
- MCC is efficient and can learn from large-scale and diverse data sources.
Paper Content
Introduction
- Images depict objects and scenes in diverse settings.
- Popular 2D visual tasks aim to recognize them on the image plane.
- 3D reconstruction is a longstanding problem in AI with applications in robotics and AR/VR.
- Structure from Motion lifts images to 3D by triangulation.
- NeRF optimizes radiance fields to synthesize novel views.
- Others predict 3D from a single image but rely on expensive CAD supervision.
- Some introduce object-specific priors via category-specific 3D templates, pose or symmetries.
- Large-scale learning is largely underexplored for 3D reconstruction.
- Motivated by advances in domain-agnostic architectures and large-scale category-agnostic learning, a scalable, general-purpose model for 3D reconstruction from a single image is presented.
- The model operates directly on 3D points and enables large-scale category-agnostic training.
- Input to the model is a single RGB-D image, which returns the visible 3D points via unprojection.
- Supervision is sourced from multiple RGB-D views with relative camera poses.
- The model is compared to state-of-the-art methods and shows superiority in both object and scene reconstruction.
Related work
- Multiview 3D reconstruction is a longstanding problem in computer vision
- Traditional techniques include binocular stereopsis, SfM, SLAM, reconstruction by analysis, and synthesis via volume rendering
- Supervised approaches predict 3D geometry via CAD, meshes, voxels, or point clouds
- Single-view 3D reconstruction is challenging
- Weakly supervised approaches use category-specific priors or learn via 2D silhouettes and re-projection
- Shape completion methods complete the 3D geometry of partial reconstructions
- Implicit 3D representations such as SDFs and occupancy nets have proven effective
- Self-supervised learning has advanced image and language understanding
- MCC adopts an encoder-decoder architecture with an attention mechanism
- MCC is supervised with “true” points derived from posed RGB-D views
- MCC requires only points for supervision, extracted from posed RGB-D views
- MCC’s input is a single RGB-D image
- MCC’s decoder masks out the attention weights to break unwanted dependencies
- MCC’s inference is efficient and the encoder cost is amortized
Query sampling
- Training involves sampling 550 queries from 3D world space
- Training queries are considered “occupied” if within 0.1 radius of ground truth point, “unoccupied” otherwise
- Ground truth is union of all unprojected points from all RGB-D views of scene
- Inference involves uniformly sampling a grid of points covering 3D space
- Queries with occupancy score > 0.1 and their color predictions form final reconstruction
Implementation details
- XYZ Patch Embeddings use a self-attention-based design to transform 3D coordinates into a C-dimensional vector
- RGB Patch Embeddings use a convolution-based design
- Architecture uses a 12-layer 768-dimensional “ViT-Base” architecture and an 8-layer 512-dimensional transformer
Object reconstruction experiments
- MCC works for both objects and scenes
- Used CO3D-v2 dataset for single object reconstruction
- 10 categories held out for evaluation, 41 used for training
- Metrics used: accuracy, completeness, F-score
- 3D augmentations build in rotation equivariance
- CO3D coordinate system used for training and testing points
Qualitative results on novel categories
- MCC tackles heavy self-occlusions and complex shapes
- MCC predicts texture for unseen regions
- MCC is robust to noisy depth from COLMAP
Ablation study
- Encoder Structure: Decoupled design performs slightly better than shared transformer
- E XYZ Design: Transformer and PointNet work slightly better than MLP
- Training Query Sampling: Uniform and contrastive-style sampling work similarly
- Feature Conditioning: Detailed conditioning works better than average-pooled vector or bilinearly interpolated vector
- Decoder Design: Concat+attn transformer works better than loc+MLP or cross-attn
- Comparison to Prior Work: MCC outperforms PoinTr by a large margin
Scaling behavior analysis
- MCC only requires points for training and does not rely on any shape priors
- Performance improves with larger training data and more categories
- Building category-agnostic scaleable models is a promising direction for general-purpose 3D reconstruction
- Expanding datasets, especially categories, is promising
Zero-shot generalization in-the-wild
- Generalization to novel categories from CO3D dataset
- MCC reconstructions on ImageNet, iPhone captures, and AI-generated images
- MCC learns general shape priors instead of memorizing training set
Comparison to image-conditioned nerf
- 3D reconstruction is possible from one or few views
- Variance in object types, image styles, depth systems, and visual context can be handled
- NeRF-WCE and Ner-Former are two recent best performing methods on CO3D
- MCC outperforms NeRF-WCE and Ner-Former when using depth as input or supervision
- MCC predicts more accurate shapes from just a single view
Scene reconstruction experiments
- MCC can handle single objects and scenes without modifications.
- Test 3D scene reconstruction from a single RGB-D image.
- Aim to reconstruct everything in front of the camera up to a certain range.
- MCC outperforms the state-of-the-art scene reconstruction approach.
- Experiment on the Hypersim dataset with over 77k images.
Hypersim scene reconstruction
- MCC is able to complete furniture, walls, floors, and ceilings from a single view.
- MCC reconstructs the room geometry but fails to capture fine details in both shape and texture.
- MCC outperforms DRDF across all metrics.
Zero-shot generalization to taskonomy
- Model MCC is trained on Hypersim and deployed on novel scenes from Taskonomy
- Model MCC is able to reconstruct room layout in challenging setting
Failure cases
- Sensitivity to depth input, can fail to reconstruct accurate 3D geometry
- Distribution shifts, errors in texture and geometry
- High-fidelity texture, omits details
Conclusions
- We present MCC, a general-purpose 3D reconstruction model for both objects and scenes
- We show generalization to challenging settings, including in-the-wild captures and AI-generated images
- A simple point-based method coupled with category-agnostic large-scale training is effective
- We provide 360-view animations and interactive 3D visualizations
- The transformer architecture is composed of 12 layers of a 768-dimensional self-attention operator with 12 heads
- We hold out 10 randomly selected categories as our test set
- We train MCC on Hypersim with Adam for 100k iterations
- We normalize each scene to have zero-mean and unit-variance
- At inference time, we predict points up to 6.0 units away from the camera origin
- We randomly scale augment images by s ∈ [0.8, 1.2]
- We train with Adam for 150k iterations
- We perform 3D augmentations by randomly rotating 3D points along each axis by θ ∈ [−180 o , 180 o ]
- We test MCC on three challenging settings
- We show reconstructions on held-out Hypersim scenes and novel scenes from Taskonomy
- MCC predicts shape details and color