Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Cross-entropy loss improves with model size and training compute following a power law
- Intrinsic performance is a monotonic function of the return defined as the minimum compute required to achieve the given return
- Intrinsic performance scales as a power law in model size and environment interactions
- Optimal model size scales as a power law in the training compute budget
- Varying the “horizon length” of the task mostly changes the coefficient but not the exponent of this relationship
Paper Content
Introduction
- Recent studies have found relationships between neural network performance and model size/training compute to be governed by smooth power laws
- Studies have focused on generative modeling with cross-entropy loss
- This paper seeks to extend these results to reinforcement learning, which generally has no cross-entropy loss
- Introduces intrinsic performance, which is defined to be equal to training compute on the compute-efficient frontier
- Studies relationships between performance, model size and environment interactions across a range of environments
Intrinsic performance
- Cross-entropy test loss scales smoothly with training compute in generative modeling
- Mean episode return in reinforcement learning does not necessarily scale smoothly
- Intrinsic performance is a metric that behaves like test loss and scales as a power law with compute
- Intrinsic performance is the minimum compute required to train a model of any size to reach the same return
The power law for intrinsic performance
- Intrinsic performance I scales as a power law with model parameters N and environment interactions E.
- Intrinsic performance I is similar to the scaling law for language models.
- Intrinsic definition of I determines the exponent β.
- Intrinsic performance I scales as a power law in N when interactions are not bottlenecked.
- Intrinsic performance I scales as a power law in E when model size is not bottlenecked.
Optimal model size vs compute
- Power law for intrinsic performance implies optimal model size scales as a power law with exponent 4
- Exponent varied between 0.40 and 0.80 for different environments
- Exponent for language modeling is around 0.50
- Exponent for 32x32 images is around 0.65
- Intriguing conjecture that exponent would be 0.5 in every domain
- Optimal model size for RL is smaller than for generative modeling
Experimental setup
- Ran experiments using RL environments: CoinRun, StarPilot, FruitBot, Dota 2, MNIST
- Used PPO and PPG algorithms with Adam optimization algorithm
- Hyperparameters in Appendix B
Procgen benchmark
- Used 3 Procgen environments: CoinRun, StarPilot and FruitBot
- Used PPG-EWMA with a fixed KL penalty objective
- Trained for 200 million environment interactions
- Used CNN architecture from IMPALA
- Conducted widthscaling and depth-scaling experiments
- Varied total number of parameters from 1/64 to 8 times the default
- Varied number of residual blocks per stack from 1 to 64
Dota 2
- Used 1v1 version of Dota 2 to save computational expense
- Used PPO with asynchronous setup to ensure only on-policy data used, no data reuse
- 8 parallel GPU workers, trained for 13.6-82.6 billion environment interactions
- LSTM architecture, embedding and hidden state sizes varied from 8 to 4096
Mnist
- MNIST environment samples a handwritten digit from the MNIST training set uniformly and independently random at each timestep
- Immediate reward of 1 for a correct label and 0 for an incorrect label
- Mean training accuracy is measured instead of mean episode return
- Horizon length of the task is artificially controlled by varying hyperparameters of method advantage estimation
- PPO-EWMA used with rollouts of length 512
- Simple CNN architecture with ReLU activations and 5x5 convolutional layer, 2x2 max pooling, 3x3 convolutional layer, 2x2 max pooling, and dense layer with 1,000 channels
- Width of network scaled by varying total number of parameters from 1/64 to 8 times the default
- Separate policy and value function networks used
Learning rates
- Tuning hyperparameters is important for quantitative results
- Adam learning rate should be proportional to initialization scale
- For width-scaling experiments, Adam learning rate should be proportional to 1/√width
- For depth-scaling experiments, Adam learning rate should be proportional to 1/depth^L
- Learning rate should be tuned separately for each model size
- Learning rate schedule should be carefully tuned for RL
- Values of scaling exponents should be considered uncertain
Results
- Power law holds across environments and model sizes
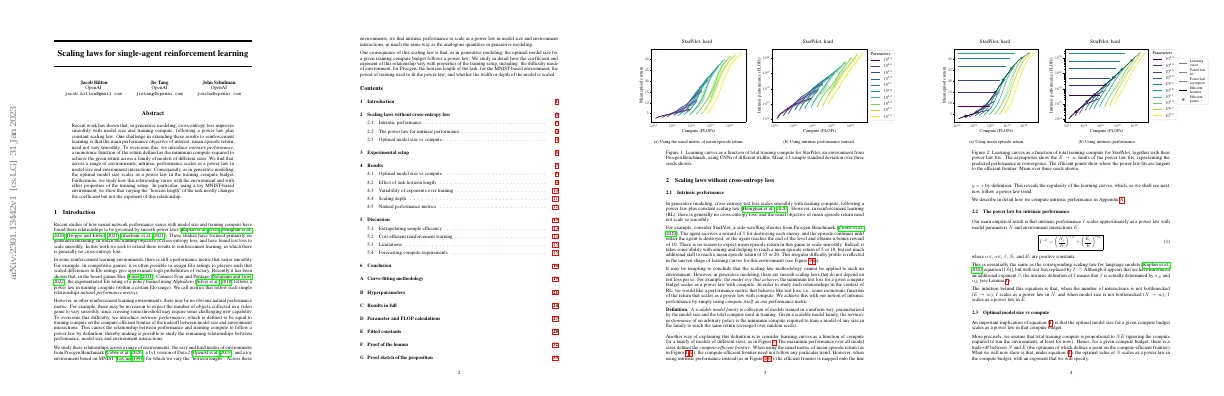
- Closeness of power law fit to learning curves shown in Figure 2 and Appendix C
- Primary determinant of exponents is domain
- Within MNIST, increasing horizon lowers exponent
- Within Procgen, easy and hard modes have similar exponents
- Difficulty mode does not affect scaling exponents
Effect of task horizon length
- MNIST experiments were used to artificially alter the “horizon length” of the task by setting the GAE credit assignment parameter λ to 1 and varying the GAE discount rate γ.
- Proposition 1 states that the covariance matrix of the policy gradient is approximately for some symmetric positive semi-definite matrices Σ θ and Π θ that do not depend on h.
- Gradient variance is an affine function of h (i.e., a linear function with an intercept).
- The number of environment interactions required should be an affine function of h.
- Results show that the number of interactions closely follows an affine function of the horizon length.
- Increasing the horizon length shifts the optimal model size vs compute curve to the right.
- Task horizon length is influenced by how long rewards are delayed for relative to the actions the agent is currently learning.
Variability of exponents over training
- Power law for intrinsic performance holds across environments and model sizes
- Scaling constants vary over the course of training
- Fitted power law to three different periods of training
- Early and middle periods of training have significantly lower scaling constants
- Measurement of scaling constants is an extrapolation if learning curves don’t reach compute-efficient frontier
- Exclude first 1/64 of training for other environments
Scaling depth
- Experiments involved scaling width and depth of networks
- Power law for intrinsic performance held, but with more noise
- Fitted values of α N and α E for depth-scaling experiments similar to width-scaling experiments
- Optimal model size for given compute budget smaller for depth-scaling experiments
- Optimal model size vs compute scaling laws more similar if measured using FLOPs per forward pass
Natural performance metrics
- Natural performance metrics can be found in some environments
- CoinRun: fail-to-success ratio is a natural performance metric
- Dota 2: TrueSkill rating system is a natural performance metric
- Intrinsic performance and natural performance metric fit closely, except for Dota 2 at higher levels
Discussion
Extrapolating sample efficiency
- We can use a power law to extrapolate sample efficiency to unseen model sizes and environment interactions.
- We can compare the extrapolated infinite-width limit to human sample efficiency.
- On StarPilot, humans are around 10,000 times more sample efficient than the extrapolated infinitely-wide model.
Cost-efficient reinforcement learning
- Sample efficiency is the primary metric of algorithmic progress in reinforcement learning.
- The cost of running the environment and the algorithm can both be taken into account.
- It is usually inefficient to use a model that is much cheaper to run than the environment when training from scratch.
Limitations
- Not separate training runs for each compute budget
- Variability of exponents over training
- Not carefully optimized aspect ratios
- High-variance learning curves
Forecasting compute requirements
- Scaling exponents for reinforcement learning lie in a similar range to generative modeling
- Scaling coefficients for reinforcement learning vary by multiple orders of magnitude
- Arithmetic intensity may confound scaling coefficients
- Sample efficiency is an affine function of the task horizon length
- Training data requirements are a sum of two components
- Continuing to increase the horizon length will eventually lead to a proportional increase in the compute budget
- Measuring scaling exponents precisely is challenging
Conclusion
- Extending scaling laws to single-agent reinforcement learning
- Notion of intrinsic performance
- Intrinsic performance scales as a power law in model size and environment interactions
- Optimal model size scales as a power law in the training compute budget
- Relationship affected by various properties of the training setup
- Implications for biological anchors framework for forecasting transformative artificial intelligence
- Computing intrinsic performance and fitting the power law constants require some care
- Intrinsic performance is the minimum compute required to train a model of any size
- Jointly fit the power law constants and a monotonic function
- Fit log (f ) rather than f
- Weight the data in proportion to 1 E
- Smooth learning curves
- Exclude data from early in training
- Greedy adaptive batch size algorithm
- Batch size schedule can be approximated by a power law
- Batch size schedule works well on different Procgen environments
- Batch size schedule works well on MNIST environment
- Tuning B min important for MNIST environment
- No batch size schedule used for Dota 2 experiments