Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Proposed a model called Meta-World Conditional Neural Processes (MW-CNP)
- Model enables an agent to sample from its own “hallucination”
- Aim is to reduce the agent’s interaction with the target environment at test time
- Obtain a latent representation of the transition dynamics from a single rollout from the test environment
- Few-shot learning by interacting with the “hallucination” generated by the meta-world model
- Agent can adapt to an unseen target environment with fewer samples than baselines
- Agent does not have access to the task parameters throughout training and testing
- MW-CNP is trained on offline interaction data logged during meta-training
Paper Content
Introduction
- Fast adaptation under uncertainty has various applications in the real-world
- Robustness in these settings requires a diverse set of skills
- World model generation is an integral part of open-ended learning
- Meta-reinforcement learning is a promising direction for increasing robustness
- Propose generating world models from the agent’s experience to reduce sample efficiency
Related work
- Meta-learning provides a framework for learning new tasks more efficiently from limited experience
- Meta-RL framework assumes tasks share a common structure but differ in transition dynamics
- Context-based meta-RL methods assume each task can be represented by a low-dimensional context variable
- Memory-augmented models and expert demonstrations are used to learn a contextual representation
- MAML is a gradient-based meta-learning algorithm
- NORML is an extension of MAML-RL for settings where the environment dynamics change
- CNP model is used to represent a family of functions using Bayesian Inference
Preliminaries
Conditional neural processes
- Parameter sharing encoders and a decoder (query network) make up the architecture of CNPs
- Random input and true output pairs are sampled from a function
- Encoder networks turn each pair into a latent representation
- Average of the representations is obtained for invariance
- Target input query is concatenated with the average representation and fed to the query network
- Query network outputs predicted mean and standard deviation for the queried input
No-reward meta learning
- NORML learns a pseudo-advantage function to guide meta-policy adaptation
- The pseudo-advantage function is used to compute task-specific parameters from a set of state transitions without reward signal
Proposed method: meta-world conditional neural process (mw-cnp)
- Problem setup: Few-shot learning, goal is to quickly adapt to unseen target task using few labeled data in target environment
- Meta-World Conditional Neural Processes (MW-CNP): Reduce number of samples required from target environment, generate world models from fewer samples, use to obtain inexpensive rollouts for finetuning at test time
- Offline meta-learning: Store transitions for each task as set of observations without task parameter
- MW-CNP training: Unlabeled batches of Markov Decision Process (MDP) tuples collected during online meta-learning
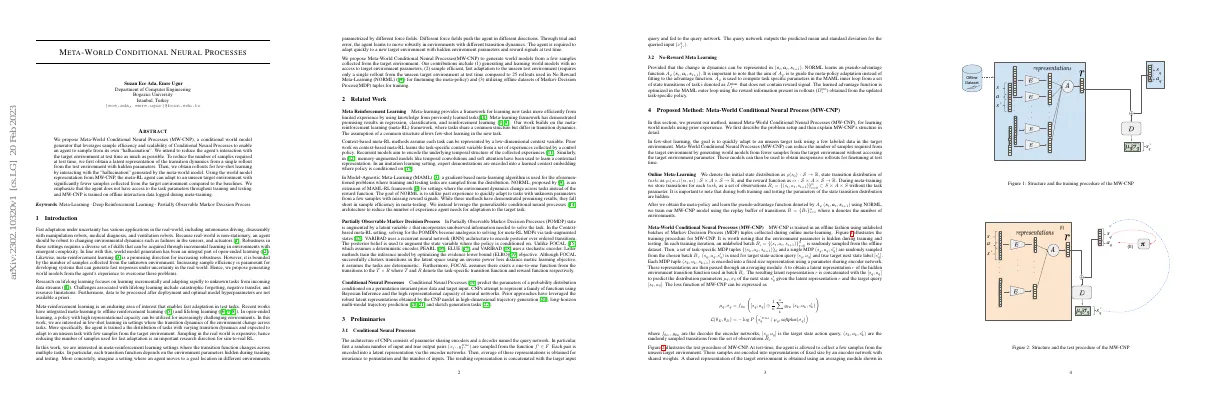
- MW-CNP: Obtain latent representation of hidden environment transition function, concatenate with [s q , a q ] to predict distribution parameters of next state, use to generate rollouts
- Finetuning: Feed experiences from generated world model to learned advantage function, finetune meta policy for fast adaptation to target task using estimated advantage values and combined set of MW-CNP generated rollouts and single target environment rollout
Experiments
- MW-CNP requires less interaction with the environment than NORML
- MW-CNP can adapt quickly to unseen tasks
2d point agent with unknown artificial force field
- Goal of the point agent is to move to position [x=1,y=0] on a 2D plane
- Meta-RL setting used with same reward function across multiple tasks
- Different tasks created by generating different artificial force fields
- 5000 tasks defined over [-π, π] interval
- Agent initially trained across distribution of 5000 tasks
- Tested in unseen target task
- Oracle agent uses 25 actual rollouts from target environment
- NORML and MW-CNP use 1 rollout for fine-tuning meta-policy
- MW-CNP outperforms NORML when using same amount of actual rollouts
- MW-CNP uses 25 mixed rollouts, similar to Oracle NORML
- Samples generated from MW-CNP can be used for finetuning meta-policy
- Results not symmetric across meta-tasks due to gradient bias
Walker-2d randomized agent dynamics parameters
- Evaluated MW-CNP in Walker-2D-Rand-Params environment
- Parameters sampled from uniform distribution range
- 40 tasks sampled for meta-training, 100 for meta-testing
- Figure 9 shows post-update reward in meta-testing
- Table 2 shows increased sample efficiency and meta-test adaptation performance
Conclusion
- MW-CNP framework can be used to collect meaningful hallucinated rollouts
- MW-CNP performance matched ORACLE and outperformed it in complex tasks
- MW-CNP model generated samples from fewer MDP tuples, increasing sample efficiency
- Using generated data for meta-updates increases sample efficiency and can yield superior performance
- Extension of work to high-dimensional sensorimotor spaces is an interesting research direction