Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Images taken in low light conditions have motion blur and photon shot noise.
- State-of-the-art image restoration networks are limited to well-illuminated scenes and don’t perform well with photon shot noise.
- A new blur estimation technique is proposed to address photon-limited conditions.
- The proposed method uses a gradient-based backpropagation method to estimate the blur kernel.
- The blur kernel is modeled using a low-dimensional representation with key points on the motion trajectory.
- This low-dimensional representation provides improved kernel estimates and better deconvolution performance.
Paper Content
Introduction
- Paper studies photon-limited blind deconvolution problem
- Blur kernel and latent clean image are recovered from blurred image
- Forward model includes blurred-noisy image, latent clean image, and blur kernel
- Deep neural networks have been used to solve blind image deconvolution
- Iterative kernel estimation method proposed to update blur kernel
- Kernel modeled in low-dimensional space by specifying key points of motion trajectory
- Iterative framework used to prove regularity of kernel estimation problem
- Better blur kernel estimates in photon-limited regimes
Related work
- Traditional Blind Deconvolution uses joint optimization framework with kernel and image priors
- Levin et. al pointed out that this framework favours the no-blur degenerate solution
- Some methods model the blur kernel in terms of the camera trajectory and then recover both the trajectory and the clean image
- Poisson deconvolution problem has been studied for decades
- Deep Learning Methods have been proposed for the blind image deblurring task
- Neural Networks and Iterative Methods have shown promising results
Method
Kernel as structured motion estimation
- Camera motion blur can be modeled as a latent clean image convolved with a blur kernel.
- The blur kernel is generated from a two-dimensional trajectory.
- A differentiable and low-dimensional representation of the blur kernel is proposed.
- A neural network is used to learn the transformations from the key points to the blur kernels.
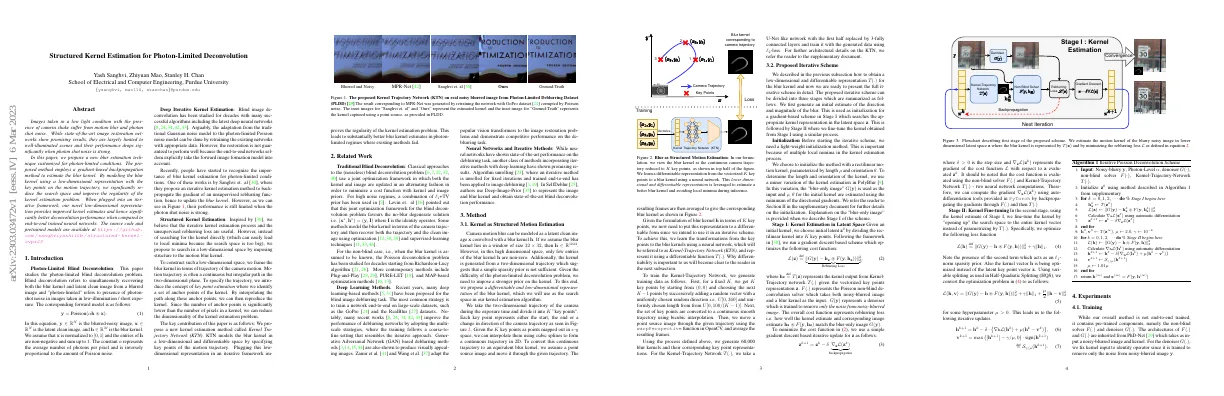
Proposed iterative scheme
- Initial estimate of direction and magnitude of blur is generated
- Initialization uses rectilinear motion kernel, parameterized by length and orientation
- Iterative scheme is divided into three stages
- Stage I searches for appropriate kernel representation in latent space
- Stage II fine-tunes kernel obtained from Stage I
- Initialization uses minor variation of kernel estimation in PolyBlur
- Cost function is evaluated using non-blind solver and Kernel-Trajectory Network
- Cost function includes reblurring loss and 1-norm sparsity prior
- Networks are retrained using synthetic and GoPro datasets
- Poisson noise is added to blurred images for retraining
Quantitative comparison
- Evaluated proposed method on 3 datasets
- Compared to state-of-the-art deblurring methods
- Used PSNR, SSIM, and LPIPS-Alex/VGG to compare image quality
- Evaluated on BSD100 with synthetic blur and Poisson noise
- Evaluated on Levin dataset with Poisson noise
- Evaluated on RealBlur-J dataset with retrained end-to-end networks
Qualitative comparison
- End-to-end trained methods compared to approach in supplementary document
- Figure 1 and 2 show examples from RealBlur dataset
- Figure 3 shows examples from PLDD dataset
- Figure 4 shows reconstruction results on synthetically blurred images from Levin dataset
Ablation study
- Performance of the scheme improves when increasing the number of key points used for representing kernels.
- Using a Kernel Trajectory Network improves the performance of the scheme significantly.
Conclusion
- We use an iterative framework for the photon-limited blind deconvolution problem.
- We use a non-blind solver to deconvolve Poisson corrupted and blurred images.
- We outperform end-to-end trained image restoration networks.
- We use a Poisson noise model for photon-limited settings.
- The signal-to-noise ratio for the measurements is low in the photon-limited regime.
- We explore photon-limited deconvolution for α ∈ [10,40].
- We use a kernel initialization method to estimate a rectilinear kernel.
- We use a KTN architecture to represent the motion blur.
- We use symmetric boundary conditions for the inverse problem scheme.
- We set the initial step size as δ = 10^5 and δ = 2.0 for Stage I and II respectively.
- We limit the number of iterations to 150.
- We use a Nvidia TitanX GPU for the experiments.
- We view the blur kernel as the continuous camera trajectory reduced to K key points.
- We learn a differentiable representation from the vectorized K key points to a blur kernel.
- We calculate the reblurring loss using symmetric boundary conditions.