Link to paper
The full paper is available here.
You can also find the paper on PapersWithCode here.
Abstract
- Exogenous state variables and rewards can slow reinforcement learning.
- Reward function decomposes additively into endogenous and exogenous components.
- Decomposition of state space into exogenous and endogenous state spaces must be discovered.
- Algorithms introduced to discover exogenous and endogenous subspaces of state space.
- Experiments show that these methods produce speedups in reinforcement learning.
Paper Content
Introduction
- Actions of an agent have limited effect on environment
- Wireless cellular network has parameters that must be dynamically controlled
- Formulated as a Markov Decision Process (MDP)
- Reward function is negative of number of users with low bandwidth
- Reward heavily influenced by exogenous factors
- Stochasticity can confuse reinforcement learning algorithms
- Need many trials to average away exogenous components
- Learning rate needs to be small
- Number of Monte Carlo trials required to estimate gradient grows large
- Analyze setting and develop algorithms to detect and remove effects of exogenous state variables
- Accelerates reinforcement learning (RL)
Mdps with exogenous states and rewards
- Study of discrete time stationary MDPs with stochastic rewards and transitions
- State and action spaces can be discrete or continuous
- State space S, action space A, reward distribution R, transition function P, starting state distribution P0, discount factor γ
- For all (s, a) in S x A, R(s, a) has expected value m(s, a) and finite variance σ2(s, a)
- State space S takes form S = x d i=1 S i
- State s can be written as d-tuple of values of state variables s = (s1, …, sd)
- Random vector for state at time t is S t = x d i=i S t,i
- Random variable for action at time t is A t
- Random variable for reward at time t is R t
- State variables can be decomposed into endogenous and exogenous sets E and X
- Vector space of m x n matrices over R
- Linear decomposition of S into endo/exo parts E and X via W
- Direct Sum of vector spaces A and B
- Vector subspace of vector space B
- Orthogonal complement of subspace A of vector space S
- Dimension of vector subspace A
- Identity matrix of size n, Matrix of zeros of size m x n
- Matrix that defines the linear exogenous subspace
- Trace of matrix A, Transpose of A, Determinant of A
- Euclidean norm of vector u
- Covariance matrix of A, Cross-covariance matrix of A, B
- Gaussian distribution with mean µ and variance σ2
Exogenous state variables
- Exogeneity is a causal concept: a variable is exogenous if it is impossible for our actions to affect its value
- Formalized in terms of Pearl’s do-calculus
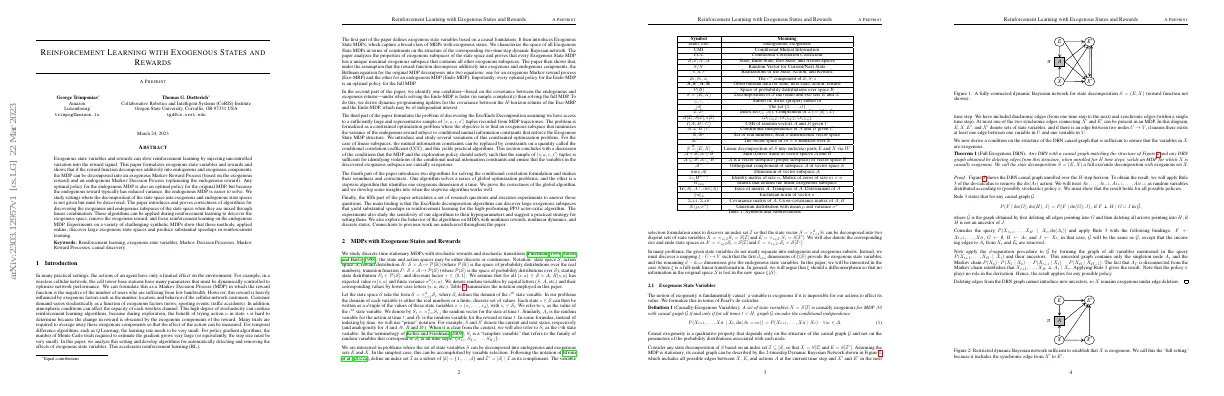
- A DBN with a certain structure is sufficient to ensure that the variables in X are exogenous
- Multiple exo/endo decompositions are possible for an MDP with exogenous state variables
- Not every subset of exogenous state variables can yield a valid exo/endo decomposition
- Interested in the exo/endo decomposition where the exo set X is as large as possible
- Maximal exo/endo decomposition is unique and contains all exogenous state variables
- Statistically exogenous variables can be inferred from data, but not necessarily causally exogenous
Additive reward decomposition
- Reinforcement learning can be accelerated when reward function can be decomposed into two functions
- One function depends on exogenous variables, the other depends on both exogenous and endogenous variables
- Mean and variance of exogenous and endogenous reward distributions can be calculated
- Bellman optimality equation can be decomposed into two separate equations
- Optimal policy for the endo-MDP is an optimal policy for the full exogenous state MDP
- McGregor et al. (2017) show how to remove known exogenous state variables to accelerate Model Free Monte Carlo algorithm
Variance analysis of the exo/endo decomposition
- Reinforcement learning on the endogenous MDP can be more efficient than on the original MDP
- Estimating the value of a fixed policy in a given start state via Monte Carlo trials of length H
- Sample complexity of estimating V π (s 0 ; H) on the full MDP compared to the sample complexity of estimating V π end (s 0 ; H) on the Endogenous MDP
- Define B π (s 0 ; H) to be a random variable for the H-step cumulative discounted return
- Theorem 5 states that the sample size bound using the endogenous MDP will be less than the required sample size using the full MDP
- Variance and covariance of the H-step returns need to be computed
- Algorithm 1 for discovering the exogenous variables of an MDP from data collected during exploration
- Exogenous state discovery problem formulated as finding a set of variables that minimizes the residuals of the fitted exogenous reward function
- Two variations of the optimization formulation
- Most general formulation in which the exo-endo decomposition is defined by a diffeomorphism
- Practical special case in which the exogenous and endogenous spaces are defined by a linear mapping
Variable selection formulation
- Variable selection formulation aims to find two disjoint sets of state variables
- Squared error of exogenous reward regression is minimized
- Conditional mutual information constraints are used to enforce structure
- Problem is broken into two subproblems
- Hierarchical formulation is a simpler proxy for the coupled formulation
Continuous formulation
- Continuous formulation assumes state space conditions
- Mapping should preserve probability densities
- Diffeomorphisms are a natural choice
- Diffeomorphisms do not lose information
- Probability density of transformation can be written analytically
- Mutual information and conditional independence are preserved
- Formulation jointly optimizes diffeomorphic state transformation and exogenous reward function
- Relaxed definition of diffeomorphism (L-diffeomorphism) allows for mappings that are bijective and continuously differentiable almost everywhere
Linear formulation
- Introduce a tractable formulation for continuous diffeomorphisms
- Consider the general linear group GL(d, R) of invertible linear transformations in vector space R d
- Define a linear mapping ξ exo from the full state space to the exogenous state space
- Define the endogenous state space as the orthogonal complement of the exogenous state space
- Represent the state-space decomposition defined by W = (W exo , W end )
- Impose the requirement that the columns of W exo consist of orthonormal vectors
- Estimate the expectations required in the optimization formulations from sample transitions
- Adopt linear regression for the exogenous reward regression problem
- Replace conditional mutual information with the conditional correlation coefficient (CCC)
- Express the coupled formulation of the exogenous subspace discovery problem for the full setting
- Express the linear hierarchical formulation for the full case
Conditions establishing sound inference
- MDPs with finite, discrete state and action spaces can be used to find valid exo/endo decompositions
- Exploration policy must be fully randomized to visit all states and execute all possible actions
- Admissible MDPs must have all states reachable from the start state and all policies must reach a terminal state in a finite number of steps
- Episodic MDPs must reset to the start state after reaching a terminal state
- Ergodic MDPs must have all states reachable from each other in a finite number of steps
- Conditional mutual information must be zero for a valid exo/endo decomposition
- Faithfulness assumption must be made to infer the structure of a causal graph from observational data
- PPO must be initialized to a fully-randomized policy to guarantee valid exogenous sets
Algorithms for decomposing an mdp into exogenous and endogenous components
- GRDS algorithm is based on linear hierarchical formulation of Equation (22)
- SRAS algorithm starts with d exo := 0 and adds one column at a time
- GRDS algorithm solves inner objective by iterating from d exo := d down to zero
- GRDS algorithm minimizes CCC and halts when it finds W exo with CCC <
- GRDS algorithm solves optimization problem on Stiefel manifold
Analysis of the global rank-descending scheme
- Assume linear regression is used to fit the exo reward function
- Directly analyzing Algorithm 2 is difficult due to estimation errors, approximations, and using CCC as a proxy for conditional independence
- Oracle-GRDS algorithm returns a matrix W exo that forms a valid exo/endo decomposition of the full form with maximal dimension
- Unique maximal subspace X max is unique and all other exogenous subspaces X must be contained within X max
- GRDS departs from the oracle version in three ways: CCC in place of CMI, parameter , and finite training sample
- Stepwise Rank Ascending Scheme (SRAS) constructs W exo incrementally by solving a sequence of small manifold optimization problems
- SRAS maintains current partial solution W exo, temporary matrix W temp, set of candidate column vectors C x, and orthonormal basis N for the null space of C x
- SRAS computes new candidate vector ŵ by solving a simplified CCC minimization problem on the Stiefel manifold
- SRAS checks if CCC is less than parameter , computes E matrix, and checks if CCC f ull is less than
- Not all subsets of the maximal exogenous subspace are valid exogenous subspaces, so SRAS does not terminate when adding a candidate vector to W exo causes the full constraint to be violated